Video: Robot Gripping by Granular Compression
An alternate approach to robot gripping readily conforms to the shape of many different target objects.

Share












A typical industrial robot has a form and function suggestive of a human arm. Does that mean the robot gripper ought to work like human fingers or a human hand?
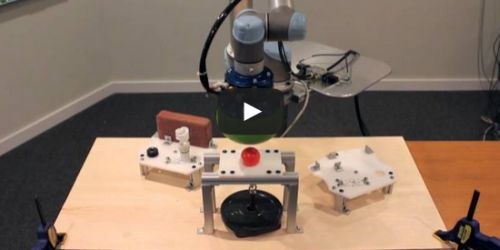
This video demonstrates an alternate concept for robot gripping. The “Versaball” from uses the compression of granular material to achieve its gripping force. This demonstration of the gripper on a robot arm from Universal Robots illustrates the strength, precision and control of the grip, not to mention its versatility, by lifting and relocating objects including a weight, a brick and a light bulb.
Related Content
-
3 Ways Artificial Intelligence Will Revolutionize Machine Shops
AI will become a tool to increase productivity in the same way that robotics has.
-
Lean Approach to Automated Machine Tending Delivers Quicker Paths to Success
Almost any shop can automate at least some of its production, even in low-volume, high-mix applications. The key to getting started is finding the simplest solutions that fit your requirements. It helps to work with an automation partner that understands your needs.
-
Four-Axis Horizontal Machining Doubles Shop’s Productivity
Horizontal four-axis machining enabled McKenzie CNC to cut operations and cycle times for its high-mix, high-repeat work — more than doubling its throughput.